About me
13 year old mechatronics and software developer based in Reno, Nevada. Currently a student at the Davidson Academy. I use my cross-domain knowledge to build projects that encompass robotics hardware, low-level firmware, and fullstack software simultaniously.
My projects
13:
DUM-E
In progress: A general purpose home assistant robot. DUM-E takes long-horizon text commands (for example "Clean this room"), uses a unique LLM+pointer+SLAM to break the task into smaller steps and also directly control the drivebase, then uses a VLA model for precise control over the arm.
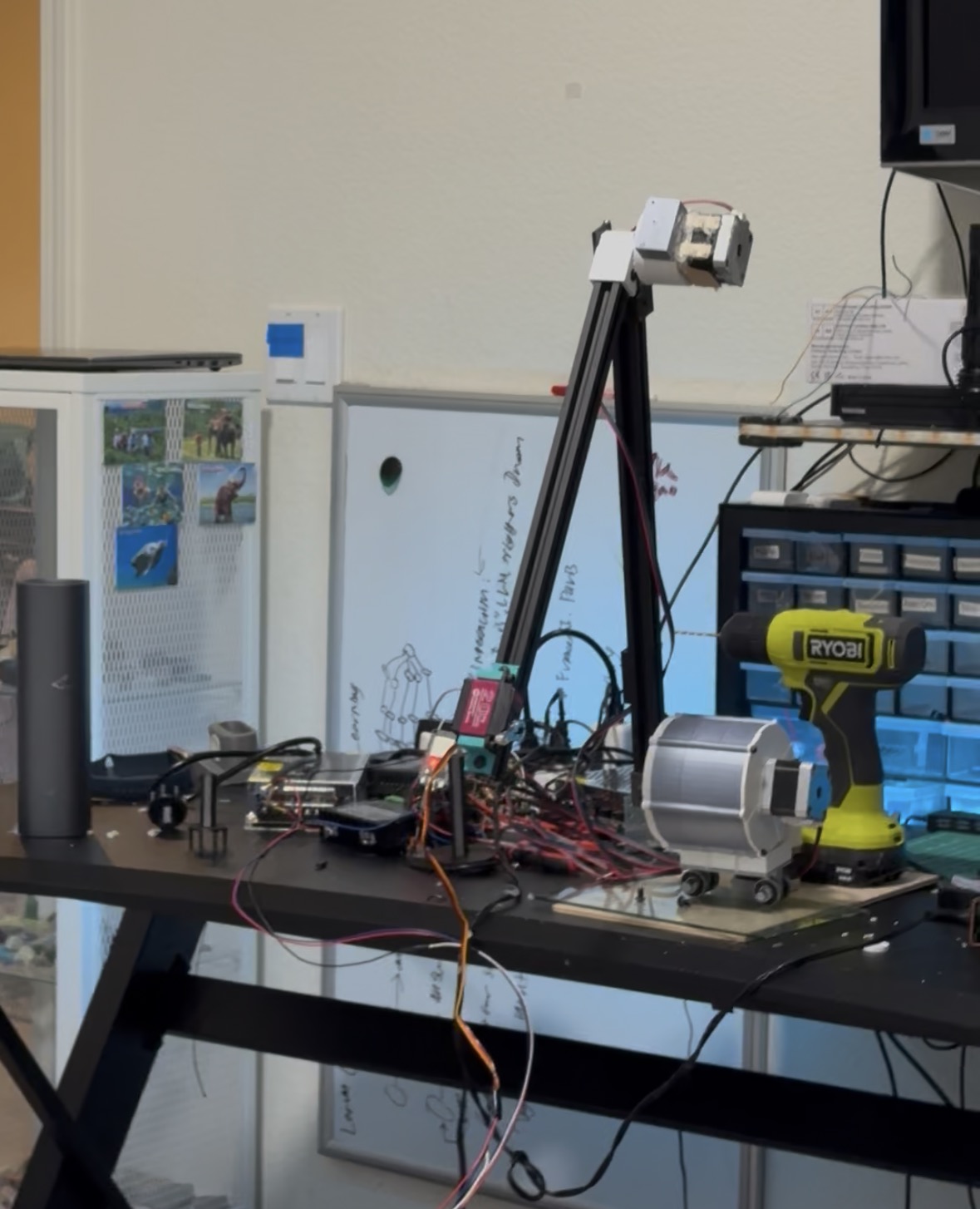
Robot Arm v6.5
My most sophisticated robot arm yet, designed to be a part of DUM-E. Built on the v6 foundation, this robot arm features 5 DOFs (+gripper), and a elbow joint driven by fiberglass-reinforced GT2 belt, moving weight away from the elbow and reducing load on the shoulder. The wrist is powered by differential helical bevel gears, allowing me to belt drive the wrist and use the wrist motors as counterweights for the payload. Uses NEMA 17s for all degrees of freedom other than gripper. The actuators use the same 5:1 stackable planetary gearbox I designed for the v6 arm, but the elbow joint gained an additional 3:1 reduction via pulleys.
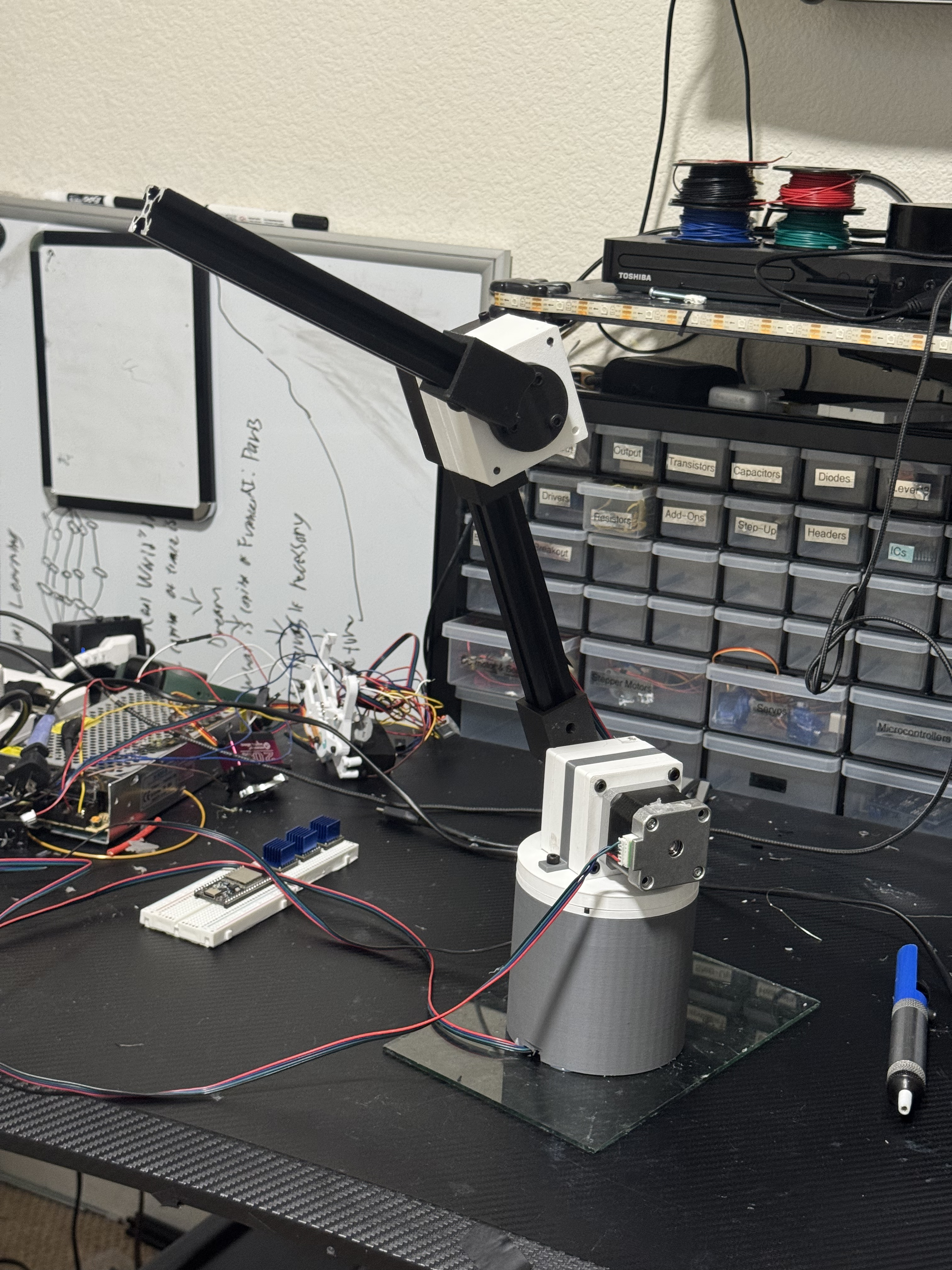
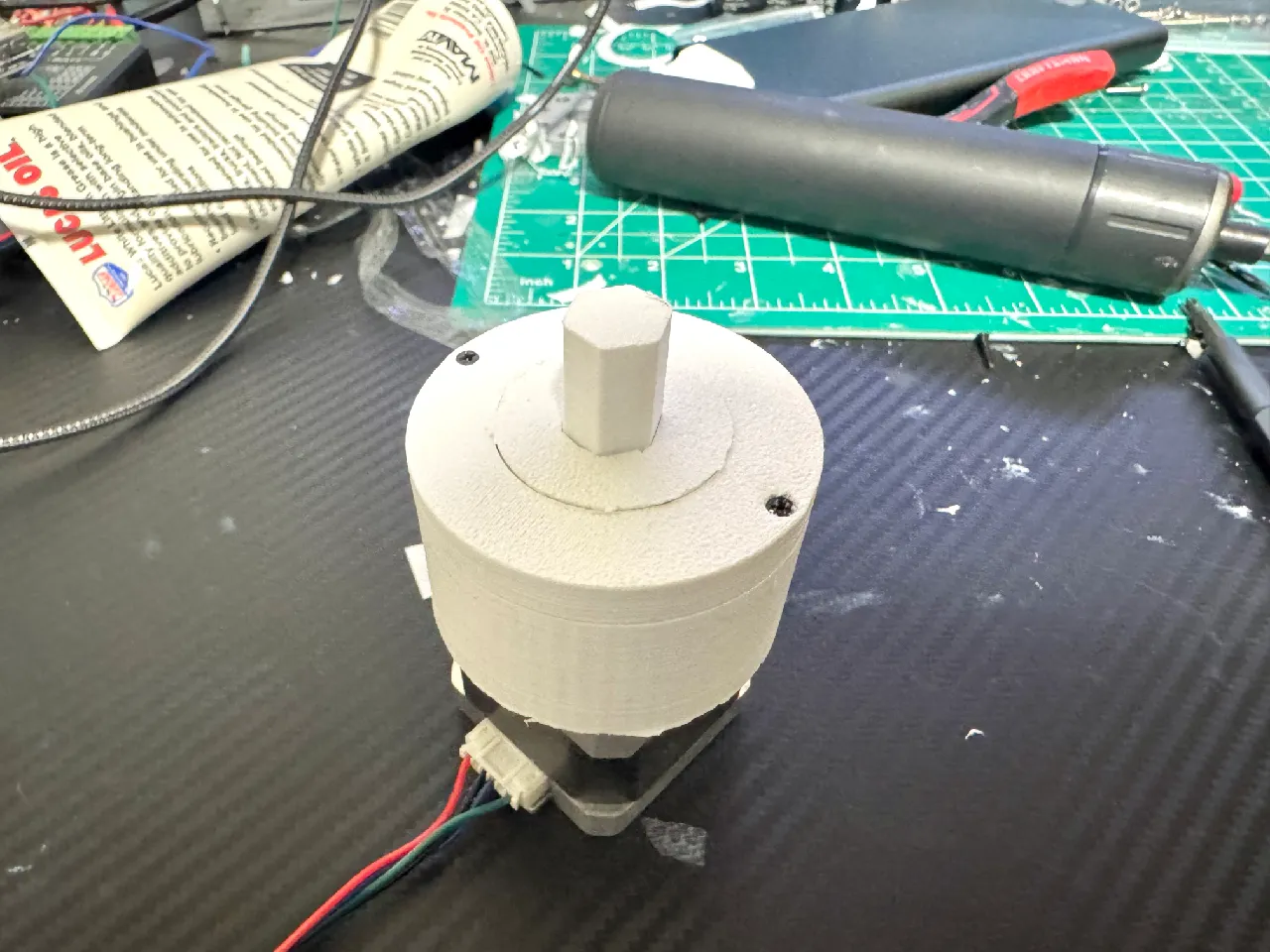
Robot Arm v6
While being smaller than the v5 arm, this arm has a significantly larger torque buffer, aiming for reliability and repetability over a larger work area. This arm boasts 3 DOFs, with plans to upgrade to 5 DOFs in v6.5. Built with aluminium extrusion and NEMA 17s. As opposed to previous arms, all joints use a stackable 5:1 planetary gearbox I designed. The shoulder and base use 2 gearboxes stacked on top of each other to get a 25:1 reduction.
Self-playing chessboard
Collaboration with Siddhartha Hiremath. This board uses a cartesian gantry powered by NEMA 17 motors, as well as a magnet on a linear actuator, to autonomously play a physical game of chess against the opponent.
Robot arm v5
My first arm to use aluminium extrusion as the arm segments. The added rigidity of aluminium led me to attempt an extremely large, 800mm total reach arm. To power the shoulder joint, I used a 64:1 3 stage planetay gearbox that I designed. The elbow and base were powered by the 9:1 cycloidal drive I designed.
InsightAI
Collaboration with Justin Barrata. InsightAI is a personalized learning platform that uses an LLM (currently Gemma4) to generate a personalized course for a user based on a text prompt and a difficulty selector. Courses include many lessons, each with examples, sources, and practice problems. Winner of the 2026 Congressional App Challenge for Nevada district #2. View the demo video here.
Cycloidal Drive
A 3d printed 9:1 reduction cycloidal drive for a NEMA 17 stepper I designed in Onshape for my robotic arm actuators. It uses dual cycloidal disks to cancel out vibrations, and is fairly compact. View and download the files to make it yourself here.
Robot arm v4
My first arm to use actuators entirely designed by me. All joints use my custom 9:1 cycloidal drive.
Pen Plotter v2
My best pen plotter so far. Instead of using 28BYJ-48 stepper motors, this plotter uses 2 NEMA 17 steppers to control the XY axes (Cartesian motion system). Frame is fully 3d printed.
Robot Arm v3
My first robot arm to use NEMA 17 stepper motors, and my first to use an belt-driven elbow. The actuators use 3:1 planetary reductions (gearboxes are not my own design).
... This site is in progress, much more of my previous projects will be added soon!